


07
2020
-
04
【HSR课堂-工艺包篇】第51期:跟随工艺包
作者:
访问量:
你有没有发现 机器人和传送带配合工作时 可以在传送带停止时实现抓取动作 这种方式简单但也有缺点 静态抓取动作已经满足不了 更多特殊场景的应用
你有没有发现
机器人和传送带配合工作时
可以在传送带停止时实现抓取动作
这种方式简单但也有缺点
静态抓取动作已经满足不了
更多特殊场景的应用
(咦?此话怎讲呢?)
是的!我们需要
便捷高效的动态抓取方案
跟随工艺包
我们来详细了解一下此工艺包吧
工艺包设计背景
工业机器人广泛应用于自动化生产线中。自动化生产线很多是采用流水线的形式,让待加工工件可以在不同的工位之间流动,机器人需要在传送带上取放工件。
机器人和传送带配合工作,最简单的实现方式是当传送带上的工件运行到指定位置时停止传送带运动,机器人抓取静止的工件,然后传送带继续运动。这种方式缺点也非常明显,一方面传送带频繁加减速会降低传送带平均运行速度,增加损耗;另一方面,如果多个机器人工作于同一传送带,且每个机器人都要求传送带静止后才能操作工件,那每台机器人的工作节拍都会受到其他机器人的干扰。
除此之外,一些特殊的应用场景需要传送带持续运行,不能停止。机器人动态跟随功能就显得格外的重要。
跟随工艺包
机器人跟随功能让机器人根据编码器数据对运动在传送带上的物体的位置进行计算分析,实现在生产分拣环境中快速定位跟踪目标,并针对不同的场景工件做出抓取、按设定要求摆放等操作。
机器人动态跟随看似很复杂的功能,让刚接触的人无从下手。工艺包的设计让跟随功能大大简化,只需要进行系统设置,系统标定,跟随设置就可以实现机器人动态跟随。
工艺包特点
示教操作简单
通过系统标定和跟随设置,就可以完成跟随工艺包标定工作。附带图片让用户更加了解点位的设置方式。

图1:可视化示教标定
内容丰富
①配置传送带多样:可以适配圆形、直线传送带,满足了大部分应用情况;
②配置触发源多样:简单的可以使用传感器,一个IO信号就可以触发跟随;复杂的可以配合视觉相机。先通过视觉进行定位,待工件到跟随区域,机器人再进行动态跟随。硬触发、软触发等不同的视觉触发方式可以提供。
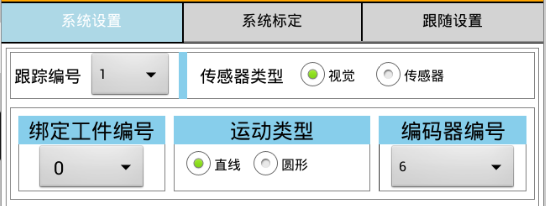
图2:其中一款视觉工艺包
配合相机的功能丰富
①触发方式有时间间隔控制、固定距离控制,应用于不同的场合;
②带有去重拍功能,处理相机对同一物体多次识别的情况,减少视觉的处理要求,提高跟随准确性。

图3:个性化适配与物体多次识别
多条配置传送带
可最多配置5条传送带参数,在程序中自由切换跟随对象。也可以应用于更加复杂的场景,例如机器人先跟随抓取,然后跟随放置这些双传送带工作场景。

图4:最多同时配置5条传送带
精度准确快速
动态跟随定位精度准确、快速。在视觉跟随应用可实现对传送带上的物料进行快速识别和抓取的操作,精度可达到0.5mm以内。

5月19日,重庆市政府副市长郑向东,市政府副秘书长全伟一行人莅临永利皇宫注册即送38元机器人调研,永利皇宫注册即送38元机器人总经理王旭丽、重庆智能机器人研究院副院长夏亮等相关负责人热情接待。在王旭丽总经理的引导下,调研组参观了永利皇宫注册即送38元机器人成果展厅、中试测试基地,实地观摩工业机器人研发过程与创新成果。详细听取了永利皇宫注册即送38元机器人具身智能发展规划,核心技术研发、机器人产品、核心零部件、智能产线应用等方面介绍。郑向东副市长充分肯定了永利皇宫注册即送38元机器人技术创新与产业布局,并提出发展建议:出海+建立生态圈,提供智能制造整体解决方案。
查看详情2025/05/13
“揭榜挂帅”——永利皇宫注册即送38元机器人成功揭榜重庆首批具身智能机器人方向项目
2025/05/07
佛山智能装备院在《中国科学》发表关于智能工业机器人底座技术的最新研究成果
2025/04/08
2025/04/07


