


16
2018
-
10
工业机器人离线编程系统软件介绍
作者:
访问量:
1:工业机器人离线编程技术现状和发展趋势
2:工业机器人离线编程软件系统介绍
3:国内外常用离线编程软件介绍
4:永利皇宫注册即送38元工业机器人离线编程软件介绍
1.1 引 言
进入21世纪,工业机器人已经成为现代工业不可缺少的工具,它标志着工业的现代化程度。随着计算机技术、微电子技术及网络技术等的快速发展,工业机器人技术也得到了飞速发展。
由于工业机器人应用范围的扩大和所完成任务复杂程度不断增加,工业机器人工作任务的编制已经成为一个重要问题。通常,工业机器人编程方式可分为示教再现编程和离线编程。
1.2 示教与离线编程
示教再现型机人在实际生产应用中存在的主要技术问题有:
工业机器人的在线示教编程过程繁琐、效率低;
示教的精度完全靠示教者的经验目测决定,对于复杂路径难以取得令人满意的示教果;
对于一些需要根据外部信息进行实时决策的应用无能为力。而离线编程系统可以简化工业机器人编程进程,提高编程效率,是实现系统集成的必要的软件支撑系统。
与示教编程相比,离线编程系统具有如下优点:
减少工业机器人停机的时间,当对下一个任务进行编程时,工业机器人可仍在生产线上工作;
使编程者远离危险的工作环境,改善了编程环境;
离线编程系统使用范围广,可以对各种工业机器人进行编程,并能方便地实现优化编程;
便于和CAD/CAM 系统结合,做CAD/CAM/ROBOTICS 一体化;
可使用高级计算机编程语言对复杂任务进行编程;
便于修改工业机器人程序。

1.3 发展历史和技术现状
早在70年代末,国外就开始了工业机器人离线编程规划和系统的研究。在众多的工业机器人仿真与离线编程系统中,由以色列Tecnomatix公司在1986年推出的Robcad工业机器人计算机辅助设计及仿真系统具代表性,其集通用化、完整化、交互式计算机图形化、智能化和商品化为一体。
九十年代以后,由于人工智能、机械电子和计算机技术以及传感器技术的迅猛发展,使得工业机器人技术更上一个新的台阶,这些技术使得离线编程的实用化成为研究的重点,先后出现一系列优秀的商业化离线编程软件产品,国外如RobotMaster 、 Robotworks、ROBCAD、DELMIA、RobotStudio等,国内如InteRobot、RobotArt等。
工业机器人离线编程系统正朝着一个智能化、专用化的方向发展,用户操作越来越简单方便,并且能够快速生成控制程序。
1.4 发展趋势
近年来,国内外许多大中型企业都装备了自动化加工设备和计算机辅助设计系统,且CAD/CAM技术已趋于成熟,其高效便捷的建模手段和集成技术,使之成为工业机器人编程中的有力工具。工业机器人离线编程系统的研制和开发涉及的问题很多,以下几个方面必不可少。
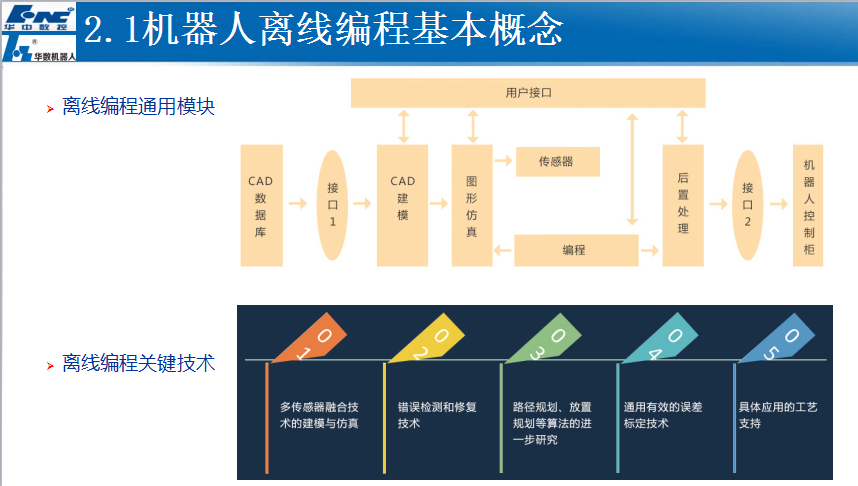
多传感器的融合技术的建模与仿真。
各种规划算法的进一步研究。
错误检测和修复技术。
研究一种通用有效的误差标定技术,以应用于各种实际应用场合的工业机器人的标定。
多媒体技术在工业机器人离线编程中的研究和应用。
2.1 工业机器人离线编程的基本概念
工业机器人离线编程系统是利用计算机图形学的成果,建立起工业机器人及其工作环境的几何模型,再利用一些规划算法,通过对图形的控制和操作,在离线的情况下进行轨迹规划。通过对编程结果进行三维图形动画仿真,以检验编程的正确性,将生成的代码传到工业机器人控制柜,以控制工业机器人运动,完成给定任务。
2.2 工业机器人离线编程的组成
工业机器人离线编程系统不仅要在计算机上建立起工业机器人系统的物理模型,而且要对其进行编程和动画仿真,以及对编程结果后置处理。一般说来。工业机器人离线编程系统包括以下一些主要模块:工业机器人系统CAD 建模、编程、图形仿真以及后置处理等。
1、CAD 建模的任务
CAD 建模的任务是零件建模、设备建模、系统设计和布置、几何模型图形处理。因为利用现有的CAD 数据及工业机器人理论结构参数所构建的工业机器人模型与实际模型之间存在着误差,所以必须对工业机器人进行标定,对其误差进行测量、分析及不断校正所建模型。
2、编程的任务
编程的任务包括工业机器人及设备的作业任务描述(包括路径点的设定)、建立变换方程、求解未知矩阵及编制任务程序等。在进行图形仿真以后,根据动态仿真的结果,对程序做适当的修正,以达到满意效果,在线控制工业机器人运动以完成作业。
3、图形仿真的任务
图形仿真的任务将工业机器人仿真的结果以图形的形式显示出来,直观地显示出工业机器人的运动状况,从而可以得到从数据曲线或数据本身难以分析出来的许多重要信息,离线编程的效果正是通过这个模块来验证的。
4、后置处理的任务
后置处理的主要任务是把离线编程的源程序编译为工业机器人控制系统能够识别的目标程序。一般采用后置处理将离线编程的结果翻译成目标工业机器人控制柜可以接受的代码形式,然后实现加工文件的上传及下载。
2.3 工业机器人四大编程语言
伴随着工业机器人的发展,工业机器人语言也得到了发展和完善,工业机器人语言已经成为工业机器人技术的一个重要组成部分。
VAL语言:是美国Unimation公司于1979年推出的一种工业机器人编程语言,是一种专用的动作类描述语言。
SIGLA语言:是仅用于直角坐标式装配型工业机器人运动控制时的一种编程语言,是20世纪70年代后期由意大利Olivetti公司研制的一种简单的非文本语言。
IML语言:是一种着眼于末端执行器的动作级语言,能人机对话,由日本九州大学开发而成。
AL语言:是20世纪70年代中期美国斯坦福大学研制的一种工业机器人语言,AL语言设计的原始目的是用于具有传感器信息反馈的多台工业机器人或机械手的并行或协调控制编程。
3.1 国内外主流离线编程软件介绍-通用
RobotMaster离线编程软件特色:CAD/CAM文件自动生成优化的轨迹自动解决奇点、碰撞、连接和范围限制问题独特的“点击拖拽”仿真环境,微调轨迹和过渡优化部件定位、工具倾斜度和有效控制外部轴针对可定制特定流程(如焊接等)控制的应用屏幕。
RobotWorks离线编程软件特色:全面的数据接口,强大的工业机器人数据库,完美的仿真模拟,开放的工艺库定义
DELMIA离线编程软件特色:从可搜索的含有超过400种以上的工业机器人的资源目录中,下载工业机器人和其它的工具资源。利用工厂布置规划工程师所完成的工作。加入工作单元中工艺所需的资源进一步细化布局。
Robot Studio离线编程软件特色:CAD导入方便。AutoPath功能。程序编辑器。路径优化
直接上传和下载。
RoboGuide离线编程软件特色:可以进行系统方案的布局设计,工业机器人干涉性可达性的分析。
系统的节拍估算,进行工业机器人故障的诊断和程序的优化
KUKA Sim离线编程软件特色:实现了虚拟的库卡控制、周期时间分析和工业机器人程序的生成。
使用与KUKA.Sim Layout 一起提供的大量电子目录组件或者从网上下载模型
4.1 InteRobot离线编程关键模块
关键技术模块介绍:工业机器人库管理模块;工具库管理模块;工业机器人控制管理模块;路径规划模块;运动学计算模块;运动仿真模块;后置处理模块。
用中国工业机器人,装备中国制造!

5月19日,重庆市政府副市长郑向东,市政府副秘书长全伟一行人莅临永利皇宫注册即送38元机器人调研,永利皇宫注册即送38元机器人总经理王旭丽、重庆智能机器人研究院副院长夏亮等相关负责人热情接待。在王旭丽总经理的引导下,调研组参观了永利皇宫注册即送38元机器人成果展厅、中试测试基地,实地观摩工业机器人研发过程与创新成果。详细听取了永利皇宫注册即送38元机器人具身智能发展规划,核心技术研发、机器人产品、核心零部件、智能产线应用等方面介绍。郑向东副市长充分肯定了永利皇宫注册即送38元机器人技术创新与产业布局,并提出发展建议:出海+建立生态圈,提供智能制造整体解决方案。
查看详情2025/05/13
“揭榜挂帅”——永利皇宫注册即送38元机器人成功揭榜重庆首批具身智能机器人方向项目
2025/05/07
佛山智能装备院在《中国科学》发表关于智能工业机器人底座技术的最新研究成果
2025/04/08
2025/04/07


