


11
2018
-
10
永利皇宫注册即送38元工业机器人控制系统介绍
作者:
访问量:
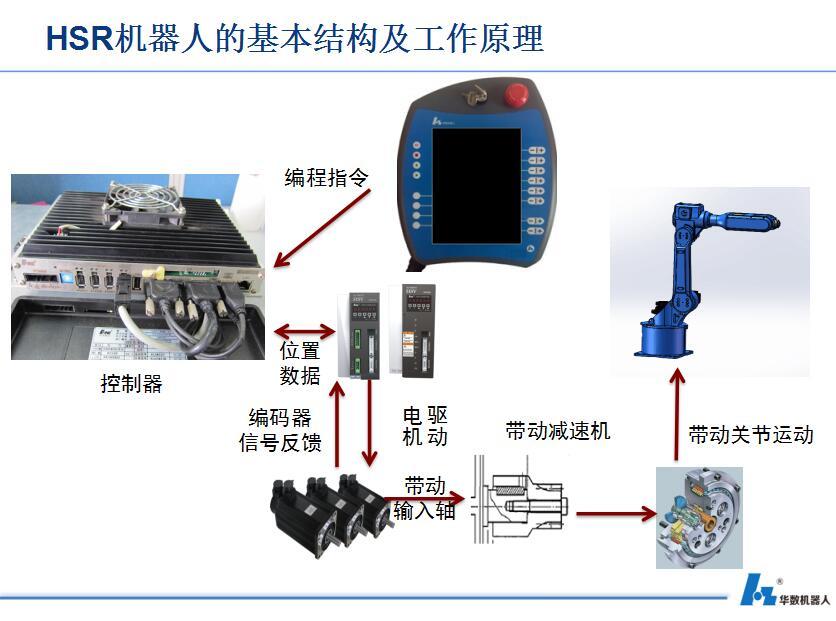
1控制系统的组成
2工业工业机器人基本概念
3永利皇宫注册即送38元III型的特点
HSR工业机器人-控制器
1.嵌入式工业计算机模块,运行LINUX系统,
2.具备PC机的标准接口:VGA,USB,COM,以太网等;
3.采用EtherCAT国际标准总线
工业工业机器人基本概念
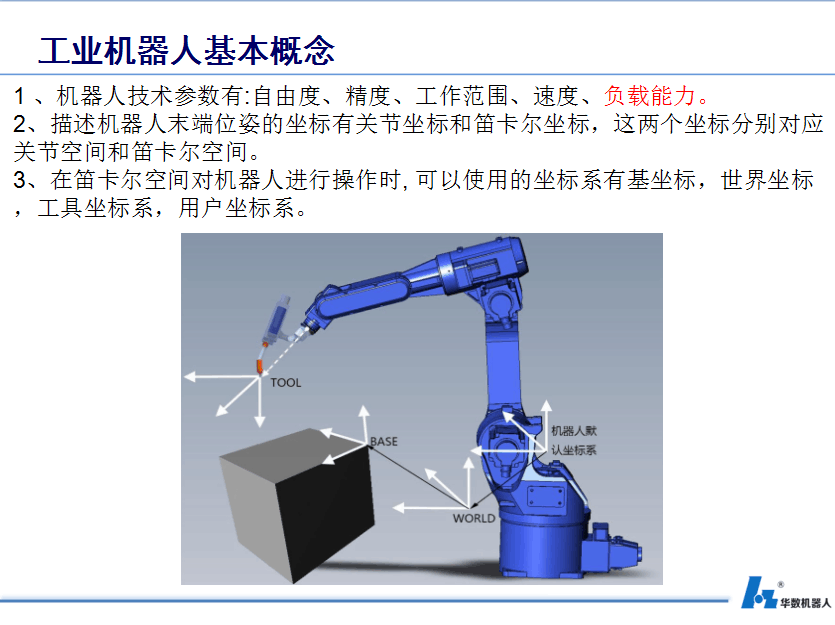
1 、工业机器人技术参数有:自由度、精度、工作范围、速度、负载能力。
2、描述工业机器人末端位姿的坐标有关节坐标和笛卡尔坐标,这两个坐标分别对应关节空间和笛卡尔空间。
3、在笛卡尔空间对工业机器人进行操作时, 可以使用的坐标系有基坐标,世界坐标,工具坐标系,用户坐标系。
4 、工业机器人示教是指:将工作内容告知工业机器人作业的编程过程。
5 、工业机器人轨迹支持三种插补方式,分别是关节插补,直线插补,圆弧插补, 插 补 命 令 分 别 是 MOVJ,MOVL,MOVC。
工业工业机器人基本概念
6、工业机器人内部软限位,通过设定的软件限位开关,可限制所有机械手和定位轴的轴范围,软件限位开关用作工业机器人防护,设定后可保证工业机器人运行在设置范围内。
7、工业机器人轴校准指工业机器人的机械位置和编码器位置会在校准过程中协调一致,确定一个与编码器一一对应的机械零点。
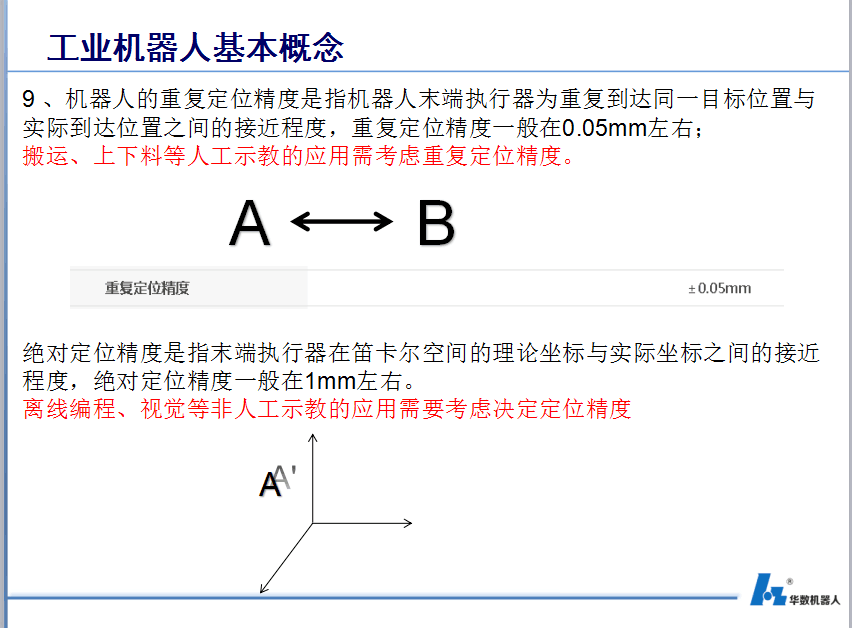
8、工业机器人的重复定位精度是指工业机器人末端执行器为重复到达同一目标位置与实际到达位置之间的接近程度,重复定位精度一般在0.05mm左右;
搬运、上下料等人工示教的应用需考虑重复定位精度。
定位精度是指末端执行器在笛卡尔空间的理论坐标与实际坐标之间的接近程度,定位精度一般在1mm左右。
离线编程、视觉等非人工示教的应用需要考虑决定定位精度
工业工业机器人基本概念
11、产线节拍
一条产线连续生产两个相同产品之间的间隔时间
产线节拍最终决定产线的产能
工业机器人速度影响产线节拍,但不是唯一的因素
产线节拍还跟生产工艺、现场布局、产线方案设计有关
评估一条新产线的节拍,需要先向客户了解生产工艺和现场布局,再由售前技术人员做产线仿真得到产线节拍。
HSR工业机器人-简易案例
指令 解释
MOVE P1; ’移动至等待位置)
MOVE P2; ’移动至接近抓取位置(抓取之前)
MOVE P3; ' 移动至抓取位置
DELAY 10 ;
D_OUT[10]=ON ; ' 输出给电磁阀一个信号,抓取工件
SLEEP 10 ‘等待
CALL WAIT(D_IN[10],ON); ' 等待抓取动作完毕;等待工件抓取完毕
MOVES P4; ' 移动至接近抓取位置(抓取之后)
MOVE P5; ' 移动至等待位置
MOVE P6 ; ' 移动至释放辅助位置
MOVES P7; ' 移动至释放位置
DELAY 10 ;
D_OUT[10]=OFF; ' 释放释放工件
SLEEP 10 '等待
CALL WAIT(D_IN[10],OFF); ' 等待释放动作完毕
MOVES P8; ' 移动至接近释放位置(释放后)
MOVE P9; ' 移动至等待位置,结束
动力学建模与参数精确辨识
动力学模型应用——拖动示教
力感知:人机共融、更安全
无力矩传感器碰撞检测,将工业工业机器人具备协作工业机器人特性!
兼容PLC功能,无需外加总控,类西门子PLC编程
支持梯形图、功能块图、结构化文本等符合IEC61131-3标准的编程语言。
节省传统总控PLC。
简化工业机器人IO交互接线。
支持Module TCP/RTU,EtherCat等工业总线
更简便的工业机器人编程语言
与我司上一代控制器相比,新一代控制器的编程指令更简洁、语法更简单、上手更快
丰富的工艺软件库
丰富的工艺软件库
焊接工艺包
视觉工艺包
上下料工艺包
涂胶工艺包
码垛工艺包
机床工艺包
传送带跟踪工艺包

5月19日,重庆市政府副市长郑向东,市政府副秘书长全伟一行人莅临永利皇宫注册即送38元机器人调研,永利皇宫注册即送38元机器人总经理王旭丽、重庆智能机器人研究院副院长夏亮等相关负责人热情接待。在王旭丽总经理的引导下,调研组参观了永利皇宫注册即送38元机器人成果展厅、中试测试基地,实地观摩工业机器人研发过程与创新成果。详细听取了永利皇宫注册即送38元机器人具身智能发展规划,核心技术研发、机器人产品、核心零部件、智能产线应用等方面介绍。郑向东副市长充分肯定了永利皇宫注册即送38元机器人技术创新与产业布局,并提出发展建议:出海+建立生态圈,提供智能制造整体解决方案。
查看详情2025/05/13
“揭榜挂帅”——永利皇宫注册即送38元机器人成功揭榜重庆首批具身智能机器人方向项目
2025/05/07
佛山智能装备院在《中国科学》发表关于智能工业机器人底座技术的最新研究成果
2025/04/08
2025/04/07


